Previous Projects
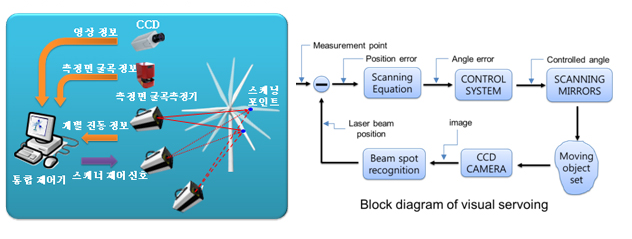
Technology development of an image-based tracking 3D LSV for rotational motion vibrational measurement
- 과제 수행기간 : 2011년 5월 1일 ~ 2016년 4월 30일(60개월)
- 과제 규모 : 연간 3억 원 지급(5년간 15억 원)
주요 연구 내용
- 등속 회전체에 대한 3대의 레이저 빔 tracking 기술
- 임의의 회전 속도를 갖는 다중 측정점에 대한 영상 인식 기술
- 장거리 측정용 LSV 기술 개발
과제지원기관
- 한국연구재단
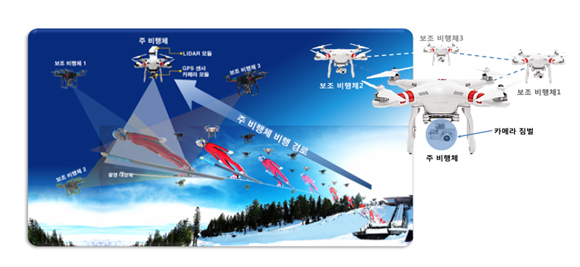
Development of recording and rendering methods based on multiple drones for performance and broadcasting
- 과제 수행기간 : 2014년 10월 1일 ~ 2017년 4월 30일(31개월)
- 과제 규모 : 연간 6억 원 지급(3년간 18억 원)
주요 연구 내용
- 다 시점 영상 촬영을 위한 무인 비행체의 편대비행제어 기술
- 카메라 영상 추적을 위한 영상 인식 및 짐벌 제어 기술
- 비행체 자율 주행 및 장애물 회피를 위한 라이다 기술
과제지원기관
- 문화체육관광부
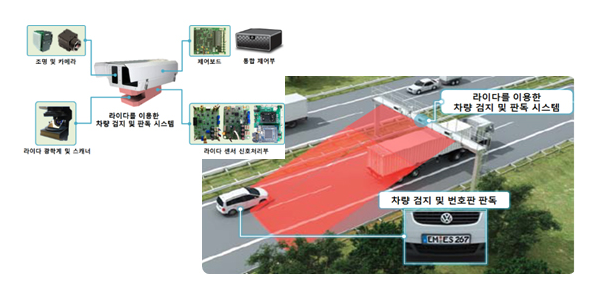
Development of a LiDAR for intelligent transport system
- 과제 수행기간 : 2014년 6월 1일 ~ 2016년 5월 31일(24개월)
- 과제 규모 : 연간 4억 원 지급(2년간 8억 원)
주요 연구 내용
- 레이저를 이용한 비접촉식 차량 검지 센서 개발
- 차량의 통행량, 속도, 차종 구분 알고리즘 개발
- 2015년 사용화 예정, 향후 보행자 검지 시스템에 적용
과제지원기관
- 미래창조과학부
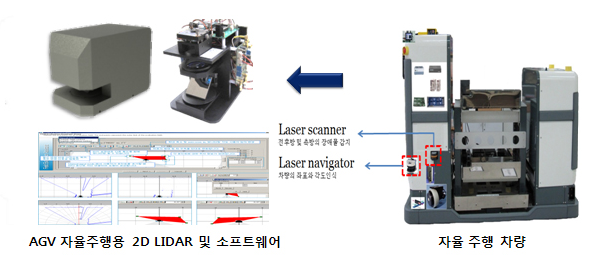
Development of a low-cosr 2D LiDAR tehnology for accident prevention of autonomous vehicles
- 과제 수행기간 : 2014년 10월 1일 ~ 2016년 9월 30일(24개월)
- 과제 규모 : 연간 4.1억 원 지급(2년간 8.2억 원)
주요 연구 내용
- 15m 급 2D 라이다(LiDAR) 개발을 위한 광학계 및 신호처리 회로 설계
- 작업 환경 변수에 의한 성능저하 문제 확인 및 개선을 위한 알고리즘 개발
- AGV 적용을 위한 통합 컨트롤러 개발
과제지원기관
- 중소기업청